Application in Focus
Our focus is subsea — and the timing is now.

The Tentacle-Arm — integrated on an observation-class ROV, operating at depth.
Subsea is one of robotics' hardest, most pressing access problems. Offshore assets are ageing, inspection and intervention demand is climbing, and the confined geometry where failures begin is exactly where conventional systems cannot operate. This is where the Tentacle-Arm's portability becomes decisive — a deployable, conforming arm that reaches inside structures without a vessel-scale intervention spread or diver risk.
Backed for Subsea
Xtent is backed by Cochin Shipyard Ltd (CSL), India to develop solutions using the Tentacle-Arm for maintenance of inaccessible areas in ships — a direct mandate from one of the country's largest shipbuilders to solve the confined-access problem in the field.
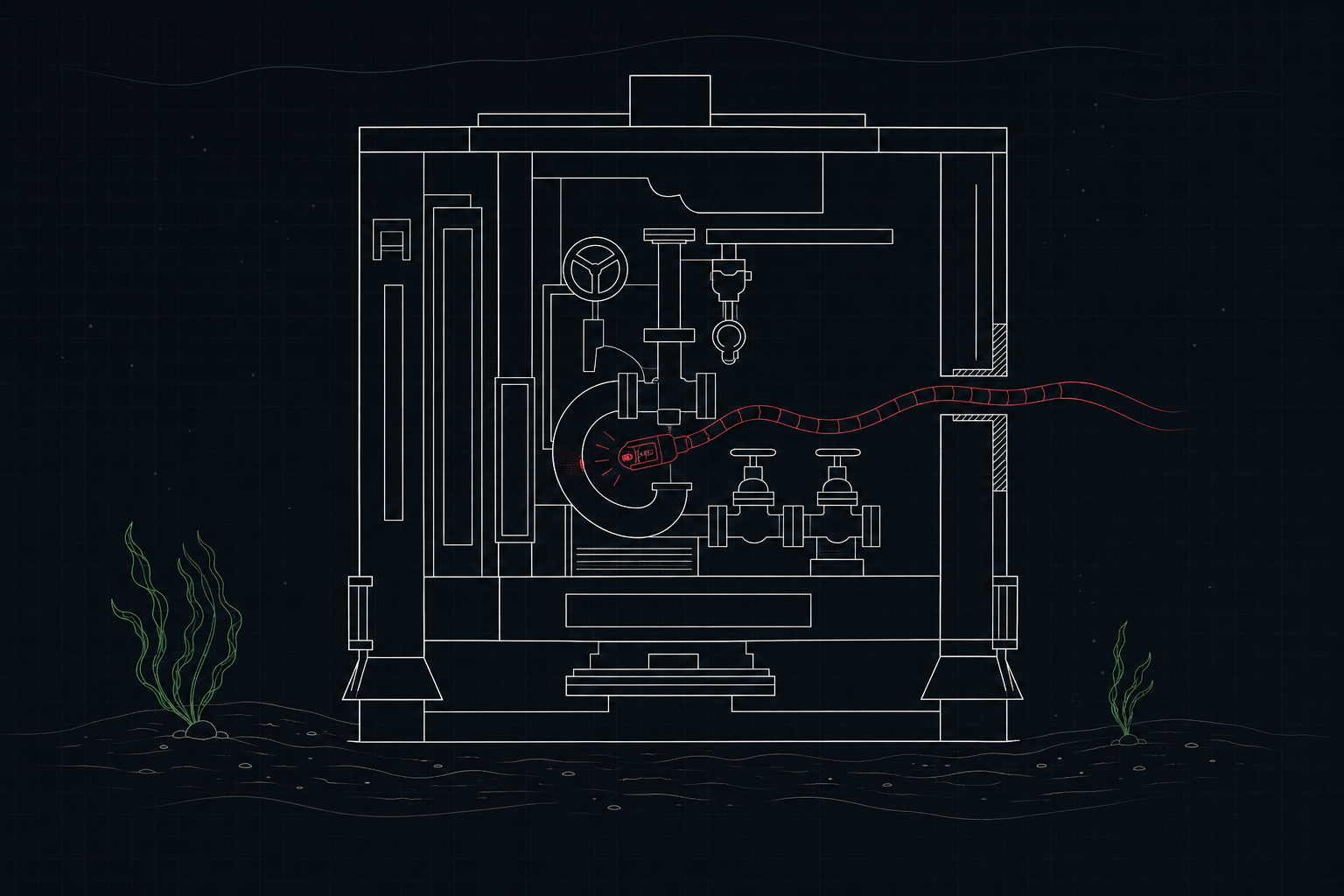
Pipelines, risers, and structures need regular inspection to catch corrosion and fatigue before failure. Confined sections are today skipped or inspected at high diver risk and cost.
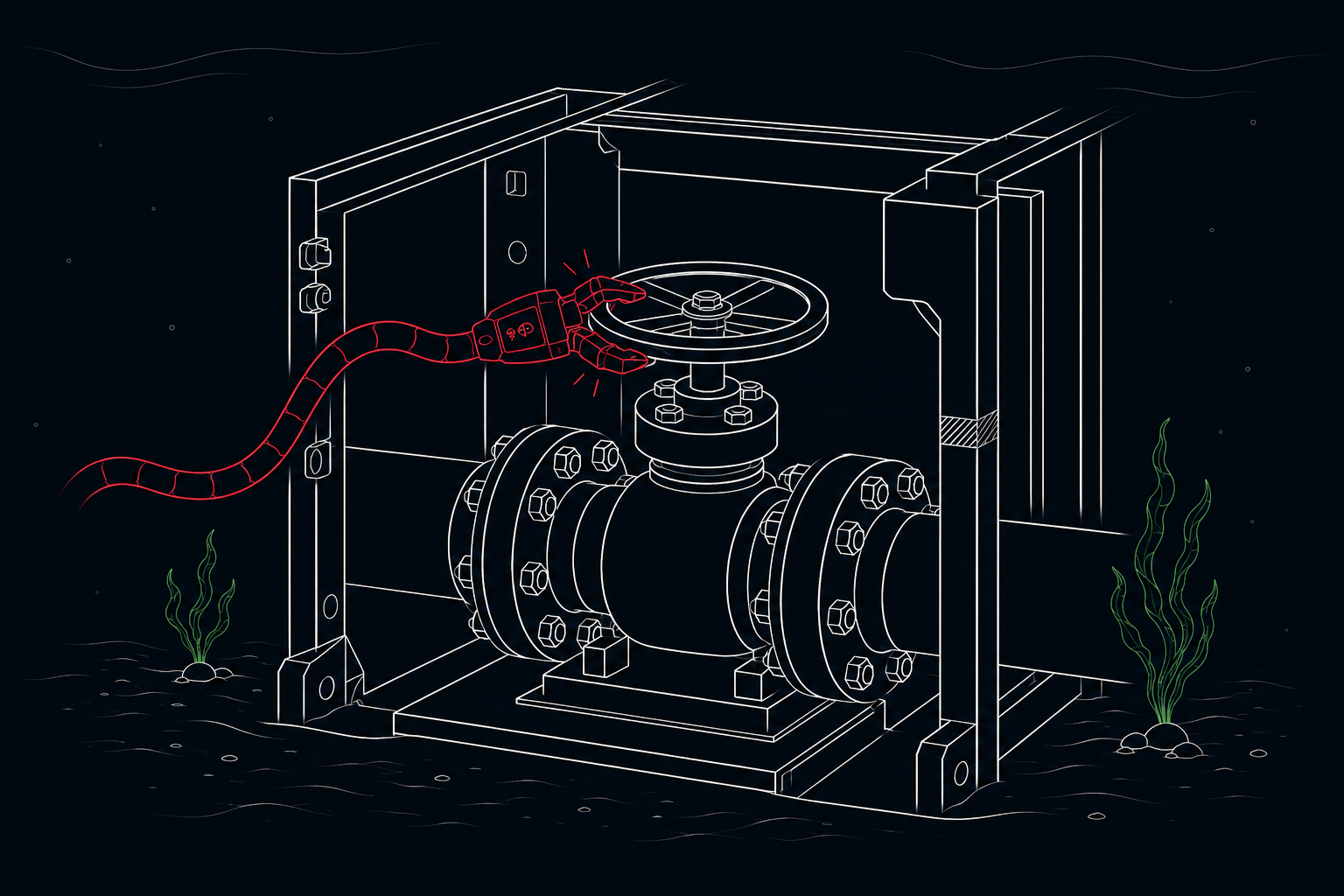
Much of subsea operational cost is physical intervention — valve actuation, connector engagement, light maintenance inside confined structures conventional ROVs cannot reach.
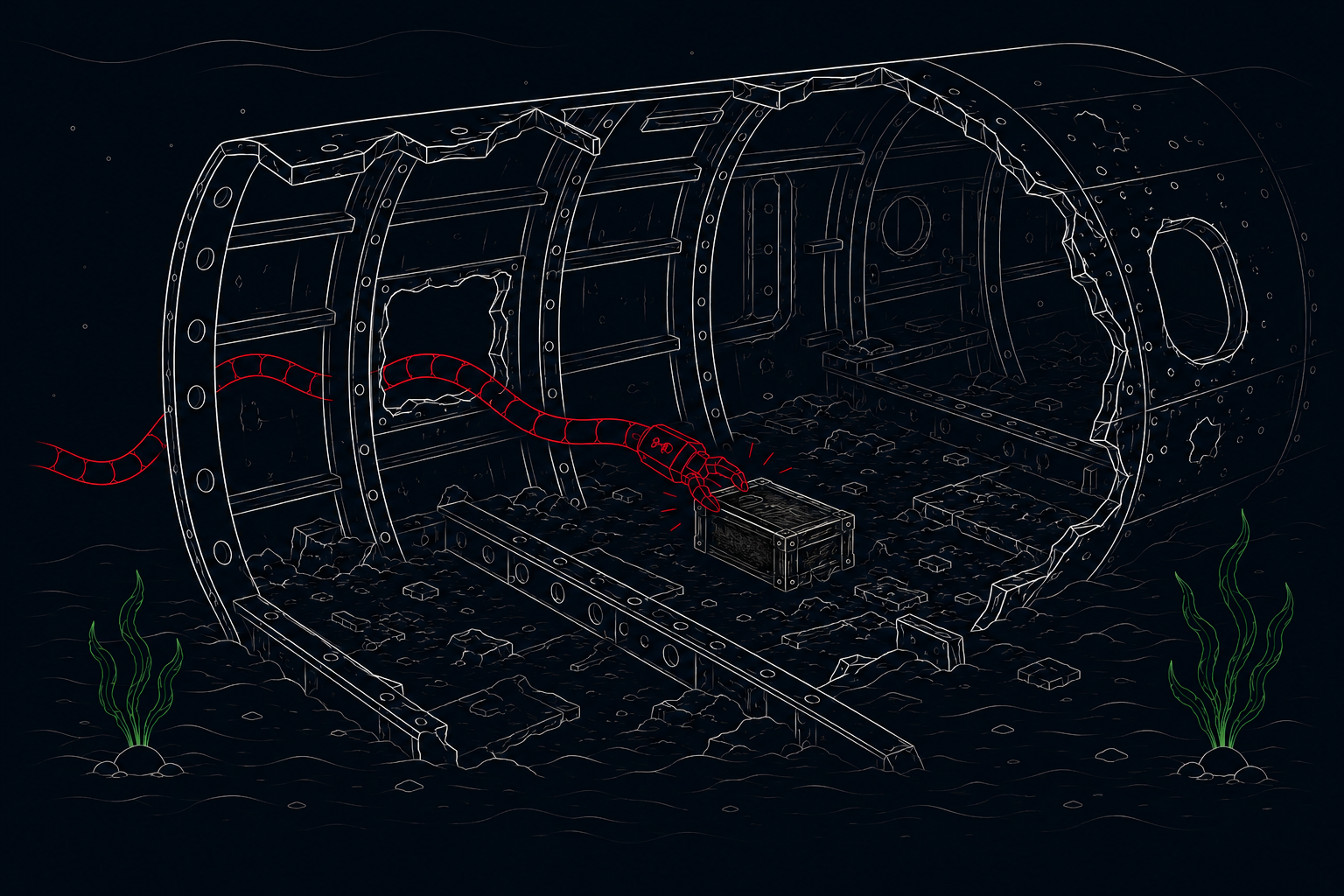
Retrieval in confined or obstructed environments is among the sector's hardest tasks. Lost tooling and debris within infrastructure create scenarios neither ROVs nor divers handle reliably.